1 Introduction
This article refers to the address: http://
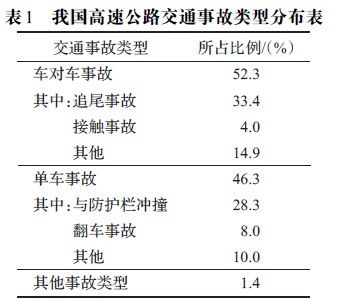
The rear-end collision is one of the most common types of accidents in China's expressways, accounting for about 33% of the total number of accidents. The main reasons for the induction are: (1) the driver's lack of concentration, resulting in negligence or improper measures; (2) fatigue driving, long-term high-speed driving on the highway, combined with a single road view, the driver is easily fatigued, leading to driving (3) Abnormal weather (such as rain, snow, fog), low visibility, safe distance of driving can not be guaranteed, and affected by the road conditions at that time, the braking effect is difficult to guarantee; (4) The vehicle itself cannot meet the performance needs of the highway. According to the statistical analysis of highway traffic accidents such as Shenda, Hening, Guangshen and Xilin, the types of traffic accidents are shown in Table 1.
Studies have shown that 90% of rear-end collisions and 60% of frontal collisions can be avoided if the driver is aware of the risk of accidents and takes appropriate measures 1 second earlier. Many automobile companies in the United States, Britain, Germany and Japan (such as Mercedes-Benz in Germany, Mitsubishi, Mazda, Nissan, Honda and Futu Heavy Industries in Japan) have carried out research on the anti-collision collision early warning system for highway-mounted millimeter-wave radar. .
In China, Tsinghua University, Zhejiang University, Shanghai Jiaotong University, Jilin University and other universities and some research institutes are conducting research on related technologies such as vehicle active collision avoidance alarm and assisted driving system. For example, Professor Zhuo Bin of Shanghai Jiaotong University has researched and developed the “active safety simulation system under the human-vehicle-road integrated environmentâ€, which has realized the compilation of traffic environment data collection, communication and driving software simulation. In the current highway traffic management, in order to ensure the safety of traffic, the vehicle line-of-sight requirements in the highway engineering technical standards are often used, and the vehicles at a certain driving speed must be kept at a corresponding distance. So how to accurately track the distance information between vehicles has become the key to the anti-collision warning system of the car's millimeter wave radar.
The interactive multi-model (IMM) maneuvering target tracking algorithm is applied to the anti-collision warning system of the vehicle millimeter wave radar. When the millimeter wave radar has certain measurement error and noise, the target tracking algorithm enables the millimeter wave radar to accurately detect the vehicle in front. The state of motion, such as the distance between the workshop and the speed of travel, thus improving the driver's safety on the highway.
2 Working principle of automobile anti-tailing warning system
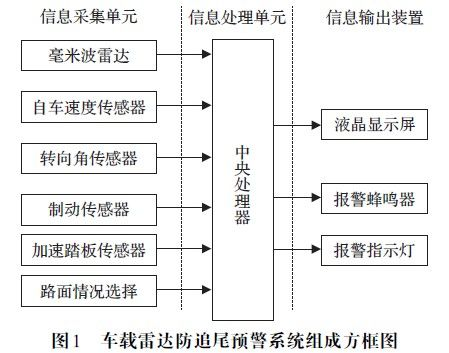
The highway car anti-tailing warning system consists of an information collection unit, an information processing unit and an information output device. The information collection unit is usually composed of a millimeter wave radar, a self-vehicle speed sensor, a steering angle sensor, a brake sensor, an accelerator pedal sensor, and a road surface selection switch; the information processing unit is mainly a central processing unit; and the information output device includes a liquid crystal display. Alarm buzzer, alarm indicator, etc., Figure 1 is a block diagram of the vehicle radar anti-tailing warning system.
The information collection unit continuously collects relevant information, and obtains the motion information of the front target vehicle by using the vehicle millimeter wave radar, such as the workshop distance and the relative speed; and obtains the self-vehicle operation state information by using the self-vehicle sensing system, such as the self-vehicle speed and the presence or absence of the steering. , with or without braking, and send this information to the information processing unit. The information processing unit calculates the current safe distance according to the vehicle speed, the relative speed and the established safety distance calculation model and compares it with the measured workshop distance. If the measured workshop distance is greater than the reminder alarm distance, the next working cycle is entered; if the measured workshop distance is less than the reminder alarm distance, an alarm is issued to remind the driver to loose the throttle and prepare for braking; when the measured workshop distance is less than the dangerous alarm distance, Then a second alarm is issued to prompt the driver to brake immediately to avoid the occurrence of a rear-end collision. The liquid crystal display is used to display the actual distance and relative speed of the two workshops. The alarm buzzer and alarm indicator are used to provide audible alarms and indicator lights. The timely alarm can effectively remind the driver to take appropriate countermeasures.
When a car is driving on a road, it is often necessary to accelerate, decelerate, and turn, and its state of motion is constantly changing. The road environment in which the moving car is located is quite complicated, and the car itself equipped with the vehicle millimeter wave radar is also in a state of maneuver from time to time. Therefore, the target detected by the onboard radar is also constantly changing, resulting in the measurement. There is a certain measurement error and noise in the distance data between the two cars, which will cause false alarm or missed alarm in the car anti-tailing warning system. A radar with a high false alarm rate can not only reduce the driver's workload, but will cause the driver to be highly nervous and have the opposite effect. Therefore, using a suitable maneuvering target tracking algorithm to accurately track the state of the vehicle target in front of the vehicle and estimate the risk of driving in time is a major task of the vehicle radar ranging system.
3 interactive multi-model motor vehicle tracking algorithm
The interactive multi-mode algorithm is proposed by Blom and Bar-Shalom on the basis of multi-model. Based on the generalized pseudo-Bayesian algorithm and Kalman filter as the starting point, an interactive multi-markov switching coefficient is proposed. Model algorithms, in which multiple models work in parallel, target state estimation is the result of multiple filter interactions. The algorithm does not require maneuver detection and achieves full adaptive capabilities. The basic idea of ​​the IMM algorithm is to obtain the initial conditions of the filter matching this particular model by mixing the state estimates of all the filters at the previous moment, at a time, assuming that a model is valid at the present moment; The normal filtering (prediction and correction) steps are implemented in parallel for each model. Finally, the model probabilities are updated based on the model matching likelihood function, and all filter corrected state estimates (weighted sums) are combined to obtain state estimates. The probability that a model is effective plays an important role in the weighted comprehensive calculation of state estimates and covariance. The design parameters of the IMM are: different matching and structural setting models; the processing noise density of different models (generally, the non-maneuver model has low level measurement noise, the maneuver model has a higher level of noise); the switching structure between the models And transfer probability. Compared with other tracking algorithms for maneuvering targets, such as Singer algorithm, input estimation (IE) algorithm, variable-dimensional filtering (VD) algorithm, etc., the advantage of the interactive multi-mode (IMM) algorithm is that it does not require maneuver detection. The maneuver is monitored [10] so that there is no error due to the model switching between maneuver and non-maneuver. The algorithm is as follows:
Suppose there are r models:
![]()
Where X(k) is the target state vector, Aj is the state transition matrix, Gj is the system noise action matrix, Wj(k) is the white noise sequence with the mean zero and the covariance matrix is ​​Qj.
A Markov chain can be used to control the transition between these models. The transition probability matrix of the Markov chain is:
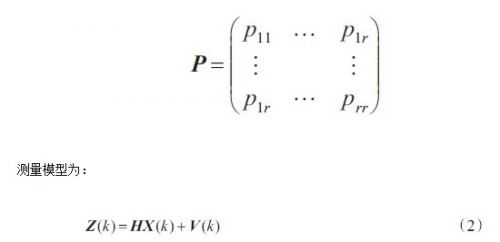
Where Z(k) is the measurement vector, H is the observation matrix, and V(k) is the measurement noise, and the variance is known as R(k). W(k) and V(k) are zero mean and independent of each other.
The IMM algorithm can be summarized into the following four steps.
Step 1 Enter the interaction:
According to the filter value and model probability of the two models (kl), calculate the initial value of the filtering after the interaction, including the initial value of the filter of the model 1: the estimated value of the filter X 01
(k - 1) and estimated covariance μ1(k - 1); filtered initial value of model 2: filtered estimate X 02
(k - 1) and estimated error covariance P02
(k - 1). Let the system model 1 probability at time (k-1) be μ1(k - 1), filter value X1
(k - 1), the estimated error covariance is P2(k - 1). The probability of model 2 is μ2(k - 1) and the filter value is X 2
(k - 1), the system estimated error covariance is P2(k - 1). Then further extended to r models, the initial value of the filtering of the r model after interaction is:

Step 2 Model Condition Filtering:
Corresponding to the model Mj(k) to X 0j
(k - 1|k - 1), P0j(k - 1|k - 1) and Z(k) are input as Kalman filtering.
Kalman prediction equation:

i = 1rΛj(k)cj_, and Λj(k) is the likelihood function for observing Z(k):

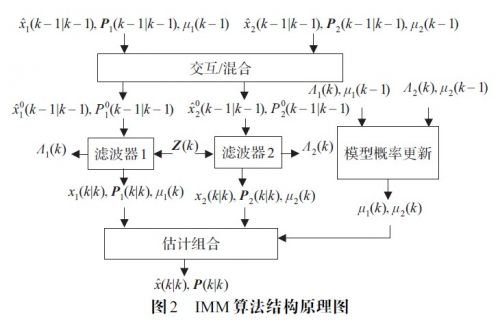
Figure 2 shows the structure of the IMM algorithm.
4 Vehicle motion model analysis and IMM algorithm tracking simulation
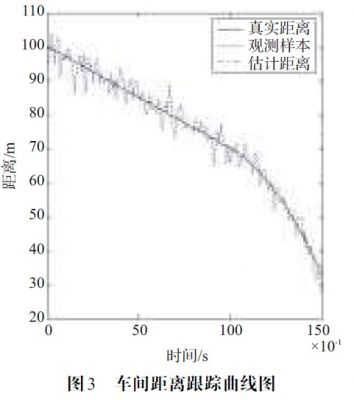
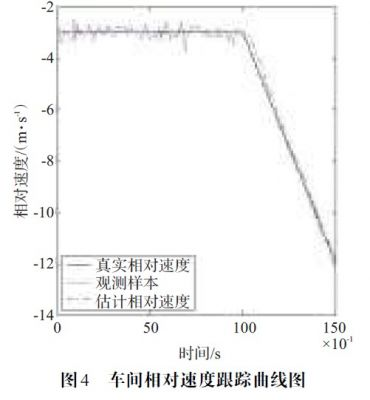
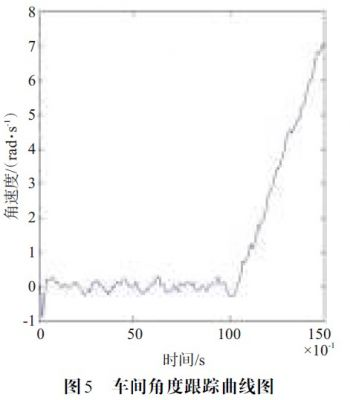
Test design: Consider two cars driving in the same direction on the road. At 0~10 s, both cars maintain a uniform linear motion. The distance between the two vehicles and the vehicle is 100 m detected by the vehicle's millimeter-wave radar installed on the rear vehicle. The relative speed is -3 m/s and the azimuth is 2°.
At 10~15 s, the front vehicle is deflected to the right, and the relative angular acceleration with the rear vehicle is 1° s2.
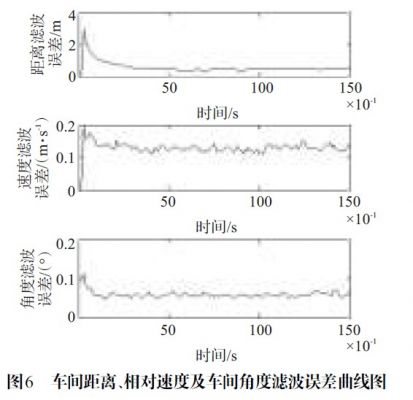
The rear vehicle accelerates, and the longitudinal relative acceleration of the preceding vehicle is a = -1.8 m/s2. The scanning period of the radar is T=0.1 s, the system noise is σα = 0.3 m/s, and σβ = 0.3°/s. The measurement error is σ1 = 1 mσ2 = 0.5 m/s σ3 = 0.2°/s.
Vehicle uniform linear motion model:
The Monte Carlo method was used to simulate the tracking filter, and the number of simulations was 400. The results of the Matlab7.0 simulation are as follows.
The simulation results from Fig. 3 to Fig. 6 show that the algorithm can effectively track the motion information of the vehicle in front, and the error is small and the precision is high.
5 Summary
The application of interactive multi-model maneuvering target tracking algorithm in vehicle-mounted millimeter-wave radar anti-tracking warning system is studied. The principle and steps of maneuvering target tracking algorithm are introduced, and the car driving on the expressway is used as anti-reality. The result shows that the algorithm has The utility model has the advantages of simple structure, small calculation amount and high precision, and can improve the use efficiency of the vehicle radar anti-tailing warning system, thereby improving the safety of driving the vehicle, and has certain application value.
5V 2A USB Power Adapter,Output 5V 2A Power Adapter,USB Power Adapter 5V,Power Strip With USB
Dongguan baiyou electronic co.,ltd , https://www.dgbaiyou.com