
Just imagine what it would be like to let a “soft robot†perform surgery on a patient. Today, in the field of ultra-microinvasive surgery, robots (also known as soft robots) have begun to play their part.
Currently, researchers at Harvard University and Children's Hospital of Boston have collaborated to develop a soft body device that helps the heart beat pump blood without coming in contact with blood. This customizable, flexible device, or new heart failure treatment program, is a boon to patients with heart failure.
The commercialization of software robots undoubtedly changes people’s traditional perceptions of robots. From the “bold man†who looks like steel to the soft “original girlâ€, software robots make the robot market more diverse and diverse.
"hard" or "soft", this is a problem
Robots, sweeping robots, and cooking robots in the industrial assembly line are all people’s impressions that they are mechanized and lack the basic impressions of the flexibility of human body movements. They are too “hard†to adapt to their own driving methods. . At present, the mainstream robots are mechanically driven. The motor is used as a power source. Through the rotation of the motor, the energy is transmitted to the gears and the connecting rods, and then the gears and the connecting rods drive the robots to move.
The use of motors, gears, and connecting rods to drive the robot must first withstand the external forces caused by the various drive linkages, so they need a very hard infrastructure. If the robot driven by the connecting rod is software, the gear will rotate and the connecting rod will shake and it will be twisted immediately. For software robots, it is generally difficult to bear the mechanical power transmitted by the connecting rods. Therefore, robots including motors, gears, and connecting rods are mostly steel mechanical components.
Therefore, mechanically driven robots perform more mechanically simple tasks, making it difficult to accomplish fine tasks. For example, a rod-driven robot can grip a cup, but it is difficult to hold the cup. It is even harder for it to hold an embroidery needle.
"Clip" and "grip" are essentially different. "Clamp" is a low-level mechanical movement. "Grip" is a fine movement with the functions of human hands. From gripping to gripping, it is actually a technological leap from ordinary robots to software robots.
Software robots imitate many mollusks in nature, made of soft materials that can withstand large strains, and have the ability to have multiple degrees of freedom and continuous transformation, and can change their shape and size at will in a wide range. Because of the combination of active deformation and passive deformation capabilities, robots can squeeze through gaps that are smaller than their normal dimensions and enter spaces that conventional robots cannot access.

Soft/hard robot comparison
How Does "72 Change" Use Soft
Since the development of software robots, the main structural types can be divided into three categories: hydrostatic skeleton, muscular hydrostatic skeleton and other structures.
Most molluscs (such as worms, sea anemones) do not have rigid skeletons but are composed of epidermis, muscle, body fluids, and nervous system. Its typical structure is that the muscles form a closed cavity, the interior is filled with body fluids, and a hydrostatic skeleton structure is formed, typically imitated caterpillar soft body robots and Blob bots.


Imitation Caterpillar Software Robot and Blob bot
The typical muscular hydrostatic skeletal structure consists of opposing transverse muscles and longitudinal muscles. When the transverse muscle contracts, the body extends longitudinally; when the longitudinal muscle contracts, the body expands laterally and the volume remains unchanged. The animal's tongue, elephant nose, and octopus tentacle are all muscular hydrostatic skeletal structures. The other structures are mainly aerodynamic kinematic chains and creep crawling robots.
At the specific application level, the robot robot named “Octobot†developed by Harvard University has its own motion fuel and can control its internal gas to realize its own motion. It does not need to connect to computers to obtain instructions, nor does it contain any electronic components. With a soft body.

The world's first autonomous robot: Octobot
Compared with ordinary robots, soft body robots can realize variable color light emission through internal chemicals, and can achieve rapid movement through inflation pressurization and channel expansion. Current research shows that software robots can quickly turn around within 30 seconds. Once the color conversion is completed, the color layer no longer needs power to maintain color. After moving to a specific location, it is often indistinguishable from the background to form a true “seventy. Two changes." At the same time, some software robots are cleverly referring to the appearance of the bionic model at the beginning of the design process. Using the 3D printing process, they can be manufactured with "reality" and difficult to distinguish with the naked eye.
Medical and military fields call software robots "point of force."
From the current point of view, the landing commercial scenario of software robots is mainly medical and military scenarios. Analyst Ke Ming, an intelligent relativity analyst, believes that the current development of software robots is quite promising, and academics are conducting such research in full swing. Scientists are trying to create a new type of robot that is different from traditional robots.
From the point of view of military applications, software robots do have much room for development. The self-conformity of “Soft†can make the robot not easily damaged when receiving external impact and damage, which greatly enhances the survivability of the robot. In addition, due to lack of electronic components, software robots can easily avoid the tracking of various types of equipment under the electromagnetic reconnaissance system. In the future, software robots equipped with specific weapons will be able to more easily undertake all types of investigations, and may even give the enemy a fatal blow under certain conditions.
In the medical field, the "small devils" soft robot can also become a doctor's excellent medical assistant. The hardness and softness of the human body of the soft body are closer to those of human skin and muscle, so the wearability and skin affinity are better. So, as a prosthesis, artificial exoskeleton and other wearable devices or used to simulate muscle movement, soft robots seem to have become one of the best candidates.
In the field of minimally invasive surgery (MIS), software robots have a great "use of force." The application of software robots can break through the limitations of traditional minimally invasive surgical methods, such as the limitations of surgical instruments caused by the low degree of freedom. The University of London has developed an octopus-like surgical robotic arm with controllable rigidity. It applies bionic principles and controls the stiffness of the robotic arm to better match the surgery according to the needs of the arm's mechanical properties. The soft material minimizes surgical injuries.
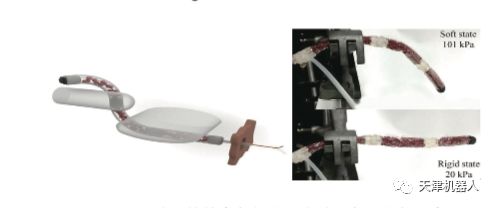
Stiffness-controllable octopus-like minimally invasive surgical robot arm
When entering the market, where are the barriers of software robots?
It is true that software robots, as a new thing, have a great potential for development, but Ke Ming, an analyst of intelligent relativity, believes that in view of its marketization process, it still has its own barriers.
First of all, theoretically, a soft body robot can achieve infinite degrees of freedom in motion. However, in actual operation, this advantage over conventional robots is limited by the number of driving methods and the number of brakes. It is necessary to accurately control the motion of the robot. This requires a lot of The sensor's information and data feedback, which is difficult to guarantee its real-time performance in the actual application process.
Second, software robots have important roles and good prospects in the medical, military, endowment, and survey fields, but their high application costs and production costs have greatly limited the popularity of such new technologies. In order to achieve commercial feasibility and practical applications in production and life, software robots have made efforts in their technical popularity and technological prices.
In the end, the eight-claw monster, a robotic robot that can run on its own fuel, mainly relies on the hydrogen peroxide fuel that is carried in the body to provide energy, while the energy carried once can barely support 4 to 8 minutes of exercise. At the same time, the existing software robot autonomous steering capability is almost zero, and it is urgent to install additional sensors to automatically avoid obstacles. This involves the optimization design of the entire software robot control system.
Of course, from the current point of view, the design method of software robots is not yet mature, and there are still difficulties in balancing the indicators such as flexibility, carrying capacity, and reliability. To make an optimal design, an accurate physical model needs to be established, and building this model is a challenging task.
In short, while the software robots continue to improve at the level of China's manufacturing industry, they are also preparing to usher in a period of rapid growth. It is also very likely to become China's next economic growth point. With the development of software robots in commercial and various industries, China The soft robot industry will be promising.
Shaded Pole Motor,Capacitor Motor Yc Series,Capacitor Motor Tl61,Shaded Pole Ac Motor
Wentelon Micro-Motor Co.,Ltd. , https://www.wentelon.com