Keep an eye out for the interior of any car in today, and you'll see more and more network devices. Of course, many of the key applications of using network functions in the car are not so easy to see, but this does not reduce their importance. Over the past decade, the use of network protocols has increased dramatically, in part because of the growing number of electronic control units (ECUs) that handle many specific functions, such as adaptive cruise control, anti-lock braking systems, and Central locking function and so on.
With the increasing demand for bandwidth, a variety of new network standards and topologies have been introduced in the car. This has led to a variety of technologies and standards for communication between ECUs, including CAN, CAN-FD, FlexRay, LIN, and MOST, and even other technologies and standards such as USB and LVDS. Sensor data sharing can be implemented in a specific way according to different bus networking methods. For example, CAN and LIN are transmitted by means of a shared bus, and there is no device level data exchange (or forwarding). In the past five years, driven by Advanced Driver Assistance Systems (ADAS), more sophisticated functions within the car have been demanding higher levels of connectivity. The throughput of data transmission is significantly increased, while requiring lower network latency, which has led to consideration of which network technology should be used. This trend is in line with the growth of in-vehicle infotainment systems, the enhancement of Wi-Fi network capabilities, and the support for future ease of use of vehicle communication (V2X) systems. It may not be surprising that Ethernet has become the de facto standard for car networking protocols for new cars. Traditional network protocols will continue to be used for some time, so it is important to add support for these traditional network protocols in the Ethernet ecosystem. IEEE 1722 has defined a method of encapsulating traditional communications (such as CAN and LIN) in Ethernet packets in order to make Ethernet the premier automotive networking technology. With long-standing validation outside the automotive world, Ethernet has an impressive capability that will help simplify the complexity of automotive networks .
Harnesses are one of the five most expensive and heaviest components in a car, so using a single proven network will help reduce cost and weight. Both 100Mbps and 1Gbps automotive Ethernet standards have required a pair of unshielded copper cables for transmission.
The increase in Internet connectivity in cars also brings potential cyber attack surfaces and intrusion points, so the focus on security is more important, but it also provides the possibility to allow Ethernet switches to provide more network functions by analyzing data flows. For embedded developers, with limited computing resources, real-time wire-speed analysis of all incoming data is challenging without introducing any delay. In order to achieve the necessary protection or other functions, a set of predetermined rules is required to detect the data packets, which can be performed according to specified data values ​​or conditions, such as new audio/video applications and time critical or sensitive network requirements. Scenes.
In a traditional Ethernet switch, the decision on which port the packet should be forwarded depends on Layer 2 (L2) of the OSI network model, see Figure 1.
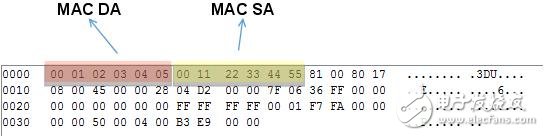
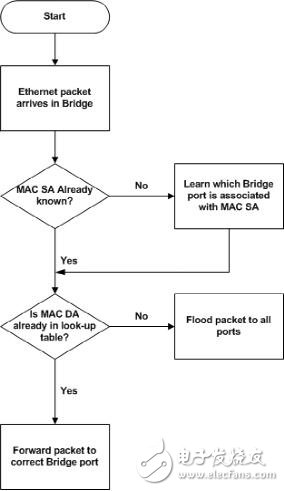
Figure 1: OSI model and packet forwarding.
In Figure 1, if the source address (SA) of the incoming frame was not previously recorded, it is added to the address database along with the incoming port number of the frame. If the destination address (DA) already exists in the bridge's lookup table, the packet will be forwarded accordingly, otherwise the frame will be flooded. Over the years, IEEE standards governing protocols used by L2, such as 802.1 MAC bridges, VLANs, and port-based network access control standards, have concentrated on the first 16 bytes of Ethernet frames. These standards are also evolving, with recent additions including Ethernet audio and video bridging (AVB) and time-sensitive network standards such as 802.1AS. In particular, the need for deterministic networks in automotive environments is becoming more and more urgent to ensure timely and reliable data transmission in the network. Locking all ECUs to a single master clock source and maintaining AV content quality are just two examples, and more enhanced features are being introduced to check OSI Layer 3 information such as IPv4 / IPv6 packet priority and IPv4 / IPv6 snooping. .
While the above techniques are basically sufficient for automotive Ethernet applications, they require greater flexibility and detection of data packets in a real-time "wire-speed" manner for advanced packet classification, debug/diagnostics, and security functions. However, whether deep packet inspection (DPI) is implemented requires a trade-off between limited space and sensitive budgets for automotive applications. This type of wire-speed packet classification was not possible in the past, mainly due to the need to use a large number of compute-intensive devices, which required more board space and increased bill of materials (BoM). However, Marvell's industry-leading secure Gigabit Ethernet switch provides this capability in the form of a compact device using a DPI engine derived from the corporate network.
The DPI engine uses a technique called Tri-State Content Addressable Memory (TCAM). The TCAM receives the packet data and compares its contents to a predefined filter to find a matching event. Based on the result of the match or mismatch, the DPI engine can determine the subsequent processing. This method provides three possibilities for matching binary data (hence the name tristate), and each data bit can be set to 0, 1 or "X" without concern. The "don't care" rule is very useful for setting masks, making it easy to check multiple data segments. By placing a large number of parallel arrays in the bridge pipeline, the TCAM supports simultaneous classification and modification of data line speeds on multiple ports. Depending on the configuration, the processing of the TCAM can be extended to some bytes in the packet header or even the payload area. DPI can perform operations such as changing the destination port of a packet, dropping a frame, mirroring a frame to another port, changing the frame or queue priority, and so on.
Let's take a look at three application cases of DPI in the car. The first one is for debugging/diagnostics. The Ethernet Onboard Diagnostic (OBD) interface is designed as a 100BASE-TX port with a speed of 100Mbps. Although this seems to be suitable for most applications, the actual situation is that the contention rate in a fully used switch will exceed 100Mbps. Data is transmitted at a rate, so all frames in the switch cannot be mirrored without affecting the performance of the actual data stream. This causes packet loss, so not all packets can be mirrored. Another method is to use DPI to identify and classify only the frames of interest, see Figure 2. In this example, there is a problem with the Precision Time Protocol (PTP) frame. The DPI rule can be set to mirror PTP messages on all ports to the OBD port. For example, EtherType (0x88F7) or MSG ID can be configured to achieve the purpose. All PTP-related frames are mirrored to the OBD port even if the switch is operating at maximum load.
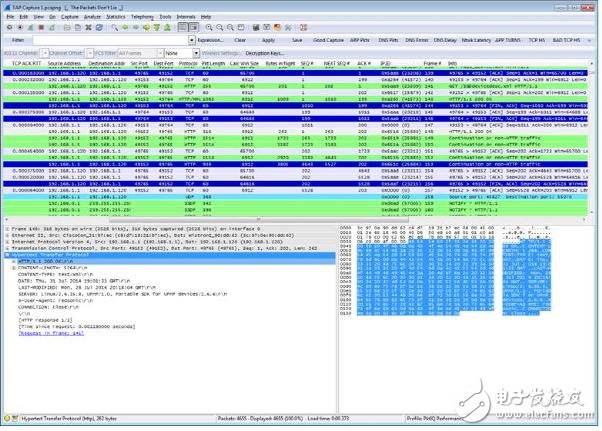
Figure 2: Debug/Diagnostic application using TCAM.
Another application of DPI is security. Identifying legitimate Ethernet packets can cost a lot of computing resources from the CPU in the data path. This means that in order to achieve real-time, low-latency classification, the processing power requirements will exceed the space, BOM, and processing power that most automotive environments can provide. However, TCAM provides a way to check that the network format of each incoming Ethernet switch packet is correct.
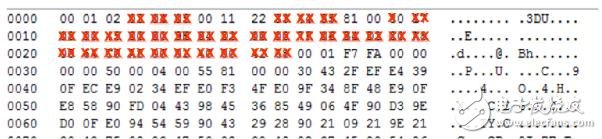
Figure 3: Wireshark screenshot of TCAM packet loss beyond acceptable range.
In the example shown in Figure 3, the TCAM mask is set to allow only incoming packets within a series of MAC DA, SA and VLAN IDs, which are destination addresses 00:01:02:XX:XX:XX( Match all MAC DA address ranges from 00:01:02:00:00:00 to 00:01:02:FF:FF:FF), source address is 00:11:22:XX:XX:XX (match all MACs) The SA address range is 00:11:22:00:00:00 to 00:11:22:FF:FF:FF) and the VLAN ID: 0x0XX (matches all VLAN IDs from 0x000 to 0x0FF).
This example uses only L2 information from the packet. However, with appropriate configuration, the TCAM can also use L3, L4 or higher information as part of the TCAM match.
TCAM provides the only cost-effective, low-latency, and low-cost resource to check each incoming switch packet. Packets that fail the above checks can be discarded or otherwise processed.
In the last application case, DPI is used to perform routing decisions for Ethernet packet encapsulation. As mentioned earlier, this is to integrate many different traditional automotive network protocols (such as LIN and CAN) into Ethernet, while the long-term goal is to reduce the complexity and cost of automotive networks. Although there are gateways to implement such packets, once they have completed the packet, a forwarding decision must be made. Using DPI provides a way to make forwarding decisions based on the data in the packet. The format of the data packet has been defined in accordance with IEEE1722-2016, so the TCAM can be used to classify data packets (such as CAN) and use CAN_BUS_ID and CAN_IDENTIFIER to create routing operations accordingly.
The use of TCAM-based DPI technology in automotive network environments opens up many new applications, standards and features that were previously not commercially viable. As connected cars become a reality, how to integrate more functions in security, while reducing the complexity of the network environment, manufacturers are facing huge challenges in these areas. DPI offers the possibility to achieve these two goals.
The robot Cable Assembly drag chain cable is mainly suitable for occasions with frequent movement and bending, because more common cables should have: high flexibility, oil resistance, shallow water and moisture resistance, UV resistance, excellent weather resistance, low temperature resistance, wear resistance, and can withstand heavier mechanical external forces ; The cable has faster acceleration and stronger bending resistance than ordinary flexible cables.
The robot cable assembly has the characteristics of high torsion resistance, and is cleverly routed between the curved mechanical arms, which can withstand more bending times, which greatly increases the service life of the equipment.
Artificial intelligence robotic cable assembly and industrial manipulator harnesses are mainly used in intelligent sweepers, industrial manipulators, service robots, etc. Their main features: Industrial robot wire harnesses are generally a combination of multi-plug and multi-wire harnesses, which are also combined with different electronic components. It has strong fatigue resistance, strong wear resistance, super bending resistance and high insulation level.
Kable-X has passed ISO9001 quality system certification, UL certification, ISO13485 medical quality system certification, ISO/TS16949 automotive quality system certification, etc.
We focus on customized high-end wiring harnesses in the fields of industry, medical, new energy, vehicle, and communication. Our team has Wire Harness R&D capability and more than 20 experienced wire harness engineers.
Welcome to consult.


Robotic Cable Assembly, Robotic Cable Assy, Robotic Cable Harness Assembly,New Energy Medical Cable Assemblies
Kable-X Technology (Suzhou) Co., Ltd , https://www.kable-x-tech.com